

 联系我们
联系我们



如果把机器人安装在地面上或平行于地面的平面上,那么通常都无需定义重力。不过用户也可把机器人安装在一面墙上或上下倒置,于是便需要定义该机器人相对于重力的方位了。 机器人防护服
如何定义重力?
1.在主题Motion下选择类型Robot。
2.选择需要定义重力的机器人。
3.编辑定义了重力的各个参数:如果需要用两个角度来描述相关机器人的方位,那么首先用Gravity Alpha参数在基本坐标系中绕X旋转该机器人, 机器人防护服,然后用Gravity Beta参数在旋转坐标系中绕Y旋转该机器人,从而以此描述相关方位。 机器人防护服,至于每个参数的详细信息,则请参见Robot类型一节中的描述。
4.保存更改内容。
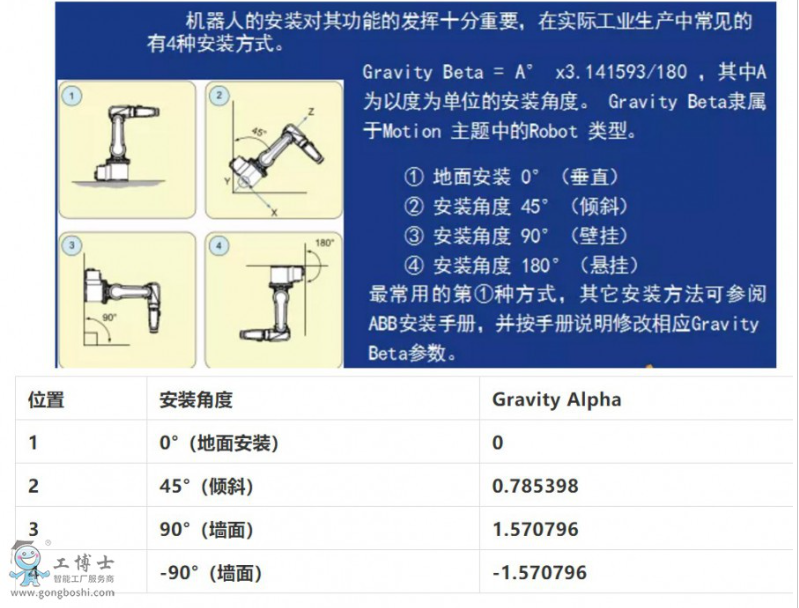
Gravity Alpha是相关机器人绕基本坐标系中X轴的正旋度, 机器人防护服,以此来定义相对于重力的机器人方位。 机器人防护服,以弧度为单位来设置该数值。
如果将相关机器人安装在墙上(绕X轴旋转) 机器人防护服,那么就需要更改该机器人的基本框架和Gravity Alpha来反映安装情况。此后的重力Alpha宜为±π/2(1.570796)。 机器人防护服,关于基本框架的更多信息则请参见如何定义基本框架。
通过以下方式来计算Gravity Alpha:
Gravity Alpha = A° x 3.141593/180 = B radians, 机器人防护服,其中A是以度为单位的安装角度,B是以弧度为单位的安装角度。
- 下一篇:库卡KR180R2500耐高温阻燃防护服
- 上一篇:安川机器人防护服